Der Einbau der Ruderanlenkungen kostete schon Überwindung, denn es mussten winzige Teile der Einlauflippe usw. ausgefräst werden. Was soll man dann sagen, wenn man die Nase des makellosen Rumpfes so einfach abschneiden soll?
Aber wenn man einen Elektroantrieb im Modell haben möchte, kommt man um diesen Schritt nicht herum.
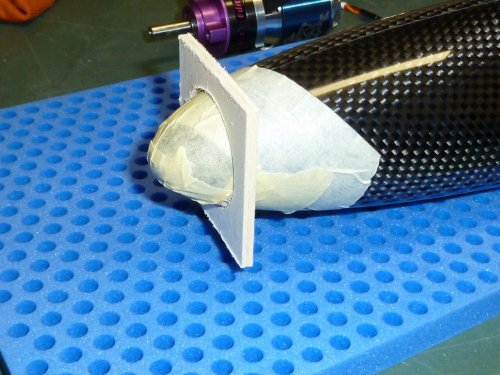
Also wurde Maß genommen in Form einer extra für diesen Zweck gefrästen Lochschablone. Zuvor wurde der Bereich um die Nase noch mit Kreppband abgedeckt, um Kratzer zu vermeiden. So konnte - mit Übermaß natürlich - die Schnittlinie angezeichnet werden.
Dann war wieder die Stunde meines Multitools. In nicht mal einer Minute war die Nase abgesägt.
Ein für die Pegger Pepper mit SuperChief Getriebe passender Motorspant wurde freundlicherweise von Daniel Lesky dem Modell beigelegt sodass meine Fräse in dieser Hinsicht arbeitslos war. Nach dem einpassen, Kontrolle der Ausrichtung und dem Anschleifen der Klebeflächen wurde der Spant mit einigen Tröpfchen Sekundenkleber fixiert. Daraufhin konnte der Motor mit dem Getriebe wieder vom Spant abgeschraubt werden, damit man zur Verklebung besser an den Spant kommt. In einer ersten dünnen Schicht wurde uhu endfest 300 an den Spant gegeben, der nach dem vorsichtigen Erwärmen schön in den Spalt zwischen Rumpfwand und Spant gelaufen ist.
Danach wurde das endfest 300 mit Baumwollflocken eingedickt und beidseitig um den Spant herum eine kleine Kleberaupe angebacht, um die Krafteinleitung zu verbessern. Da zwischen Spant und Getriebe wenig Platz ist, wurde zum Aushärten der mit Trennwachs eingetrennte Motor wieder montiert. Dadurch wird vermieden dass Klebeharz sich an Stellen bewegt, wo es nicht hin soll und somit eine vernünftige Befestigung am Spant verhindert.
Der Motor hat zusätzlich noch einen Temperatursensor bekommen, der direkt auf die Windungen geklebt wurde. So hab ich die Motortemperatur jederzeit auf dem Schirm.
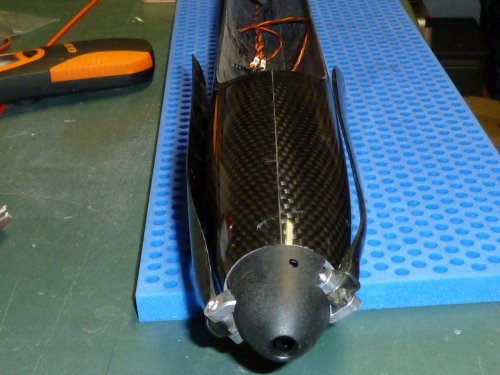
Dies ist mein erster Getriebeantrieb mit Polygonachse, also einer beidseitig abgeflachten, ellipsenförmigen 7/6mm Achse. Damit kann ich mein gewohntes Schleiftool (für 6mm Achsen) zum Anpassen der Rumpföffnung an den Spinner nicht einsetzen. Daher musste ich kurzerhand ein neues Tool entwerfen mit 7mm Lock statt 6mm Messingrohr in der Mitte. Das bedeutete auch einen etwas schwierigeren Arbeitsschritt beim Anpassen des Spinners, denn wegen der Polygonachse fehlte die sonst übliche, gute Führung und präzise Ausrichtung durch die Motorachse. Aber das Ergebniss kann sich sehen lassen Der Spinner passt prima und der Spalt ist so groß wie er sein soll.
Warum hab ich einen Reisenauer-Spinner verwendet und keinen anderen schicken Sichtcarbon-Spinner? Nun einerseits bin ich eher pragmatisch als ästhetisch veranlagt, weshalb ich mich für die sehr praktische und bewährte Reisenauerversion entschieden habe. Andereseits wird durch Verwendung der Polygonachse die Auswahl an Spinnern doch sehr übersichtlich.
Die Optik ist zweitrangig, hier hat die Praxistauglichkeit ganz klar die Nase vorne. Ein passender Freudenthaler Carbonspinner wäre noch im Fundus (vom Skywalker) verfügbar gewesen, der hat sich in der Parxis aber als Gummifresser erwiesen, weshalb am Skywalker seit Jahren auch ein Reisenauer-Spinner mit seinen bewährten Führungsstegen für die Prop-Gummis seinen Dienst versieht.
Die Luftschrauben liegen nicht perfekt an, das hab ich bei den Riesendingern aber auch nicht erwartet. Ich bin mit dem Ergebnis sehr zufrieden. Es ist wie beim Skywalker und dort konnte ich keine negative Beeinflussung feststellen.
Nach dem nochmaligen Auswiegen wurde klar, dass ich mit dieser Kombination ohne Bleizugabe den empfohlenen Schwerpunkt von 108mm einstellen kann. Feineinstellungen folgen dann später. Leider brachte die digitale Schwerpunktwaage auch zu Tage, dass die 5,5kg Grenze nicht gehalten werden kann. Der Pace wird auf ein Abfluggewicht um 5,6kg kommen.
Im finalen Arbeitsschritt geht es nun noch um die Fixerung des Antriebsakkus (6s5000 Hacker eco) sowie der Einbau der RC-Komponenten. Hier werde ich noch ein RC-Brett konstruieren, auf dem alle Komponenten zusammen angeordnet sind.