Beim jüngst gelieferten OrcaPro war auch noch ein neuer Rumpf für den Orca4eX mit dabei. Damit hab ich mal angefangen, bevor ich mich dem OrcaPro widme. Es ist zwar "nur" ein neuer Rumpf, aber dennoch viel Arbeit.
Da war zuerst einmal die Überlegung, die Servos für Hohen und Seitenruder nach vorne zu holen, damit vorne mehr Gewicht vorhanden ist. Grund dafür waren 30g Blei, die zum mir passenden Schwerpunkt beim aktuellen Rumpf nötig waren.
Also schnell mal am CAD eine schicke Halterung konstruiert und die Fräse damit gefüttert. Das Ergebnis kann sich sehen lassen, praktische Versuche haben aber gezeigt, dass die Servos an der geplanten Stelle zu exponiert sind und Kabel sich möglicherweise dort verklemmen können. Zudem wird der Platz für Akku und Regler zu eng. Deshalb wurde der Plan wieder verworfen.
Also Servos wieder im Bereich der Serviceklappe untergebracht und auch die Kabel zur Fläche gleich angefertigt und eingebaut. Dabei hab ich gleich auch noch Kabel für ein ACL reserviert, weil ich auch den Orca4eX damit ausrüsten möchte.
Der Motor war recht fix eingebaut. Im Gegensatz zum Vorgängerrumpf hab ich mich für ein kleineres Mittelteil (29mm) und einen etwas kleineren Spinner (32mm) entschieden, sodass der Motor einen Hauch weiter Vorne sitzt und der Übergang Spinner Rumpf noch etwas geschmeidiger aussieht. Der selbst konstruierte und gefräste Spant war schnell eingeklebt. Im Motor hab ich noch einen Temperaturfühler auf die Wicklung geklebt, weil der Orca künftig die Telemetrie über ein LinkVario realisiert und hier eine Temperaturmessung möglich ist (leider keine Drehzahl).
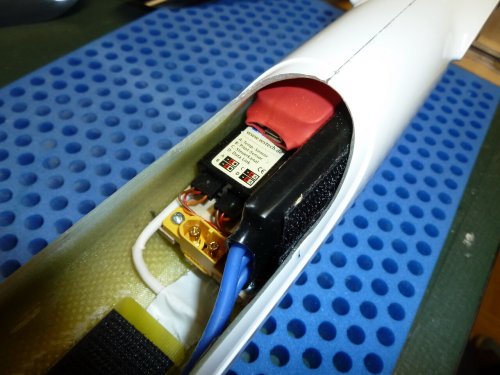
Dann war da noch die Unterbringung der restlichen RC-Komponenten (Empfänger, Regler etc.). Hier hat sich die Nutzung eines RC-Bretts, das man mit einer Schraube am Rumpf sichert bewährt. Daher hab ich ein solches Brett konstruiert und gefräst. Die Besonderheit hier ist der fest eingebaute XT-60 Stecker mit fest verlötetem (UniLog) Stromsensor. Damit sind die Kabel sauber verlegt und das anstecken des Akku geht wesentlich leichter von der Hand.
Nun wurde dann noch die fummelig einzusteckende HR-Anlenkung auf mein bewährtes System modifiziert. Wie beim Orca 2 hab ich hier ein etwa 20mm langes Präzisions-Messingröhrchen in die aufgebohrte Kugel eingeführt. Die Kulisse war dankenswerterweise schon auf das benötigte Maß aufgeweitet.
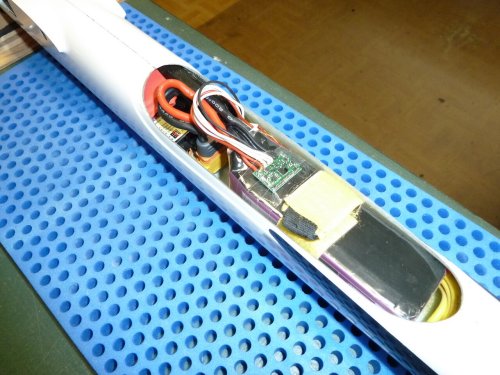
Den Abschluss bildete noch das Akkubrett. Der Akku wird in bewährter Weise mit einem Klettband gesichert.
Nach dem Auswiegen des Schwerpunktes war zuerst einmal keine Bleizugabe nötig. Mag sein, dass auch die Reparaturen am alten Rumpf hinten zu dem Bleiballast geführt haben.
Heute fand dann, bei eisigem und stürmischen Ostwind, der Erstflug mit dem neuen Rumpf statt. Wie gewohnt fliegt der Orca einwandfrei und ich konnte gut eine Stunde fliegen, trotz des Windes. Auch die Landung war wie gewohnt problemlos und der Assist war bei dem böigen Wind wirklich eine gute Hilfe und Erleichterung.
Mit dem neuen Rumpf erstrahlt der Orca fast wieder im alten Glanz und ist noch etwas praktischer geworden durch die etwas geänderte Unterbringung der RC-Komponenten.