Mit Orcas fertig stellen hab ich ja schon einiges an Erfahrung sammeln können. Also ist der Aufbau des Orca-Pro doch eine überschaubare Aufgabe, auch wenn viele neue Dinge verwendet werden. Daher gab es beim Aufbau einiges zu beachten und bedenken. Es soll ja alles einfach erreichbar sein und der Auf- und Abbau soll schnell und werkzeuglos erfolgen können.
Einerseits ist da der Antrieb. Meine geliebte Peggy Pepper ist leider viel zu leicht für den Orca Pro mit dem dicken Hintern, weshalb ein Innenläufer mit Getriebe eingebaut wird. Nun ist herstelleitig schon ein Motorspant eingeharzt, was soweit eine tolle Sache ist, entfällt damit das Abtrennen der Nase. Leider ist der Holzspant für meinen Antrieb aber komplett unbrauchbar, weil einerseits die Lochanzahl als auch der Lockkreisdurchmesser nicht passen. Also hab ichnach einigem Überlegen den Spant mit einem Stufenbohrer ausgebohrt, der geschickterweise eine 29mm Stufe hat, die perfekt zu einem noch im Fundus befindlichen Motorspant für das 5:1 Reisenauer-Getriebe passen. Somit ist der Antrieb schon mal abgevespert.
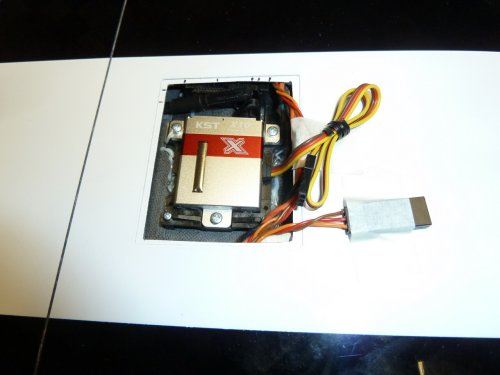
Bei den Tragflächen steht nur der Einbau der Servos und die Verkabelung an. Da ich alle neuen Modelle noch mit ACL ausstatten möchte, musste ich die Pinbelegung am MPX-Stecker der Fläche ändern, damit ich die beiden Pins des ACL noch unterbringe. Der Einbau der Servorahmen ging schnell und einfach von der Hand, da ich das ja schon zigfach durchgeführt hatte. Dank meiner Aufzeichnungen hier auf der Website konnte ich die nötigen Schubstangen und Abtriebshebel schnell ausfindig machen. Da die WK-Anlenkung aber klassisch "Überkreuz" ausgeführt wird, war hier etwas ausprobieren angesagt. Letzlich war der viertkleinste Servohebel mit 9mm Hebelarm die passende Lösung um einerseits größtmöglichen Klappenauschlag zu bekommen aber noch akzeptable Hebelverhältnisse zu haben.
Die ACL-Blitzer von unilight nehmen Platz auf der Abdeckung des Querruderservo. Hier musste ich nur ein 4mm Loch bohren, um das Kabel durch den Deckel zu führen.
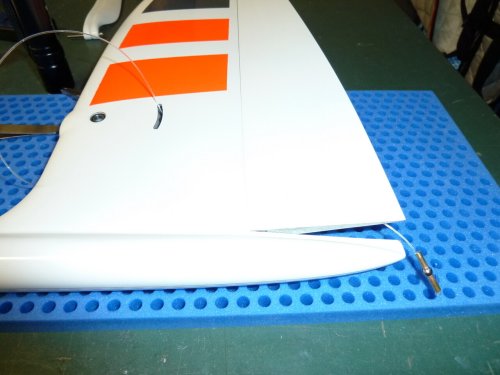
Wie auch zuvor beim neuen 4eX-Rumpf wurde die HR-Anlenkung noch auf mein System mit Messingröhrchen modifiziert, um den Aufbau des Modells zu vereinfachen. Dies war um einiges kniffliger als beim 4eX. da der Orca Pro eine innenliegende SR-Anlenkung hat, und man daher das Ruder nicht überdehnen kann, um die modifizierte Kugel mit Messingröhrchen am Nylonfaden wieder einzuführen. Aber auch das war kein nennenswertes Hindernis.
Bleibt noch der "Innenausbau" des Rumpfes. Hier habe ich das Konzept vom vorherigen 4eX übernommen und alle RC-Komponenten auf ein Brett untergebracht, welches vorne über eine Schraube am Rumpf gesichert wird. Das Brett beherbergt den Rex10A-Empänger, Das LinkVarioPro mit Stromsensor und GPS-Modul sowie die Blitzelektronik. Da diese nur mit 12V arbeitet, wurde kurzerhand ein winziger Stepdown-Regler vorgeschaltet, der auf 12V Ausgangsspannung eingestellt wurde. Der Empfänger wie auch das LinkVarioPro werden über 3D-gedruckte Halter aufgenommen. Den Halter für das LinkVarioPro habe ich mangels Vorlage selber konstruiert.
Mit auf dem RC-Brett ist auch ein fest engebauter XT60-Stecker an den der Stromsensor direkt angelötet ist. Damit wird die Kabelführung wie auch das anstecken des Antriebsakkus massiv vereinfacht.
Vom Regler wird ein Drehzahlsignal bereitgestellt, welches das LinkVarioPro bereitwillig verarbeitet. Am Motor selber hängt noch ein Temperatursensor (TC1046) um die Erwärmung des Antriebes im Auge zu behalten. Auch dieser Parameter wird vom LinkVarioPro verwaltet. Einfach ein geniales Teil. Nur eine TEK-Düse nutze ich (noch) nicht am Orca. Mal abwarten ob das nicht auch noch eingebaut wird.
Bleibt nur noch die Modifikation der Außenflügel. Die Magnete (6x6mm N52 Neodym) zur Befestigung sind bereits eingeklebt, es fehlen nur noch die Schlitze und GfK-Streifen für die Rudermitnahme. All dies vereinfacht den Aufbau des Modells enorm und das ist mir bei meinem Brot- und Buttermodell sehr wichtig.