Da hat sich doch noch ein Pace VX in meine Werkstatt eingeschlichen und darum gebeten, fertig gestellt zu werden.
Das Teil kommt in neon-pink daher (ist auf den Bilder nicht so ersichtlich) weshalb hat es von mir den Arbeitstitel "Neon-Barbie Edition" bekommen hat.
Beim Bau ist mir aufgefallen, das ich beim Bau meines Pace leider recht wenig dokumentiert habe was die Anlenkungen etc. betrifft. So musste ich die Servodeckel meines Pace nochmal abnehmen und nachschauen, welcher Servohebel in welcher Grundstellung steht und was für Stubstangen verwendet wurden. Daher nun dieser kurze Baubericht um den Faxpas zu beheben.
Begonnen habe ich mit dem Rümpf-Hinterteil. Hier war das Highlight wie auch schon beim ersten Pace die doch sehr eigen geformte Anlenkstange des Seitenruders. Die beiliegende Edelstahl-Gewindestange wurde so gebogen, dass der Alu-Gabelkopf einerseits schräg zum Ruderhorn herausragt und sich andererseits geschickt unter die Schubstange des Höhenruder manövriert. Nachdem die Stange dann miot dem Carbonrohr verklebt wurde kam der unangenehme Teil. Meine Kohle-Rovings zeigten leider keinerlei Kooperationswillen und haben sich nach Kräften gewehrt sich umwickelt an der Gewindestange festzuhalten. Erst ein zwangsweise darübergestülpter Schrumpfschlauch brachte die Rovings dann zur Räson.Das zuvor eingetränkte Harz brachte dann das endgültige Resultat.
Dank meiner Fräse, Fusion 360 und Estlcam konnte ich alle schon für den zuvor gefertigten Pace konstruierten Teile noch einmal nutzen, was sehr viel Zeit gespart hat. Hier hat der Teil der Dokumentation also gut funktioniert.
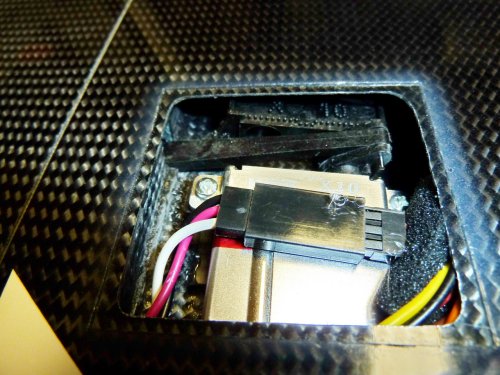
Der Motoreinbau wie auch das RC-Brett waren problemlos einzubauen. Einziger Unterschied waren die Sperrtopfantennen des als Zweitempfänger verwendeten REX3. Diese waren etwas schwieriger unter der Serviceklappe unterzubringen und die Fixierung erfolgte mit ein paar Tropfen Heißkleber. Neu ist die Befestigung des XT90 Akkusteckers. Dieser ist auf dem RC-Brett mit einem selbst konstruierten Halter befestigt, sodass der Akku einhändig ein- und ausgesteckt werden kann.
Nachdem der Rumpf fast fertiggestellt war, ging es an die Flächen. Hier zeigtre sich dann, dass ich keinerlei Aufzeichnungen zu den verwendeten Ruderhebeln & Co. hatte. Daher hier nochmal kurz die Zusammenfassung, was wo verwendet wird.
Wölbklappe:
Hier wird eine Überkreuz-Anlenkung verwendet, weil die für mich wegen des Risiko eines Bodenkontaktes einfach praxistauglicher erscheint. Die Ruderhebel hat Daniel Lesky dankenswerterweise beigelegt.
Als Schubstange kommt die mit 57mm Achsenabstand zum Einsatz (die viertkleinste Schubstange). Der Servohebel hat 8,5mm Achsabstand (der drittgrößte Hebel).
Auf dem Bild unten kann man die Servoposition bei Ruder-Nullstellung (Strak) sehen. In Servo-Mittelstellung stehen alle Servohebel senkrecht nach oben.
Querruder innen:
Hier wird die IDS-Anlenkung verwendet. Der Ruderhebel wird wie von Daniel empfohlen bearbeitet also seitlich stark beschnitten, der vordere Steg entfernt, angerauht und mit 1,5er Löchern etwas perforiert umd die Klebefläche zu vergrößern.
Als Schubstange kommt hier die Zweitkürzeste mit 51mm Achsenabstand zum Einsatz. Der Servohebel ist der Zweitkleinste mit 6mm Achsabstand verwendet. Hier kann der Passstift zur Befestigung der Schubstange noch problemlos in Nullstellung eingesetzt werden.
Querruder außen:
Auch hier wird IDS verwendet.
Als Schubstange kommt hier die Kürzeste mit 48mm Achsenabstand zum Einsatz. Der Servohebel ist der Zweitkleinste mit 6mm Achsabstand verwendet.
Der Antrieb ist nahezu identisch zu meinem (Reisenauer PeggyPepper mit SuperChief Getriebe. Nur die Ausgangswelle ist diesmal rund und nicht als Polygon ausgeführt. Als Regler kommt ein Sunrise ICE 100 mitsamt seines 7,2V SBEC zum Einsatz, weil es Beschaffungsprobleme mit dem Sword 100 gab.
Ein Hacker eco 6s5000 übernimmt die komplette Energieversorgung.
Empfänger ist ein Jeti REX 10 mit einem REX 3 als Satellit (via EX-Bus). Die Telemetrie in Form des Vario, GPS und Antriebsvermessung, erledigt ein Eigenbau-Sensor auf Basis des VarioGPS.