Es war eigentlich eine Routineaufgabe. Schnell mal die Servorahmen und Anlenkungen in die Fläche einkleben und die Anlenkungen anbringen. Blöd wenn man keine Anleitung hat bzw. nichts von einer Anleitung weiß. Das kann sich dann doch in die Länge ziehen.
Aber der Reihe nach. Die Baudis IDS-Anlenkungen sind die bei weitem solidesten, die ich bisher verarbeitet habe. Alu-Ruderhebel, Alu Schubstangen und teilweise auch Alu-Servohebel. Massiver und präziser geht fast nicht.
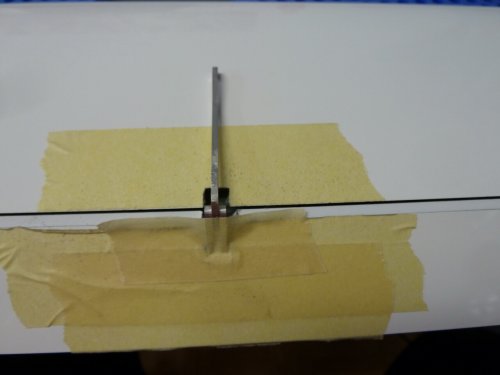
Zuerst musste das Ruder bearbeitet werden, damit die Alu-Ruderhebel dort Platz finden. Hier wird hauptsächlich die Einlauflippe im Bereich des Ruderhebels entfernt, damit dieser in die Ruder eindringen kann zur späteren Verklebung. Weiter muss an der Gegenseite an der Tragfläche auch ein Ausschnitt entfernt werden, damit bei Ruderausschlägen nach oben der Hebel weit genug in die Fläche eintauchen kann. Aufgrund fehlender Informationen habe ich es versäumt, den Ruderhebel des Querruder um weiter 2mm weiter in die Fläche "einzuschleifen" um einerseits die Hebelverhältnisse zu verbessern, andereseits aber auch die der Länge der Schubstange Rechnung zu tragen.
Dies ist aber erst nach dem Einkleben der Ruderhebel aufgefallen, weil beim positionieren der Servorahmen aufgefallen ist, das die Schubstange des Querruder zu lang ist und der Holm faktisch im Weg stand.
Da es unmöglich ist, einen festgeklebten Ruderhebel ohne Beschädigung der Fläche wieder zu entfernen, hab ich mich dazu entschlossen, eine alternative, etwas kürzere Schubstange zu konstruieren und in GfK zu fräsen. Das erste Ergebnis war noch etwas dünn, was aber im zweiten Versuch verbessert wurde. Aluhebel sind geplant, hier benötige ich aber noch passende Fräser und Expertise mit dem Material. Die GfK-Schubstangen sind aber für den Einsatz im Querruder stabil genug.
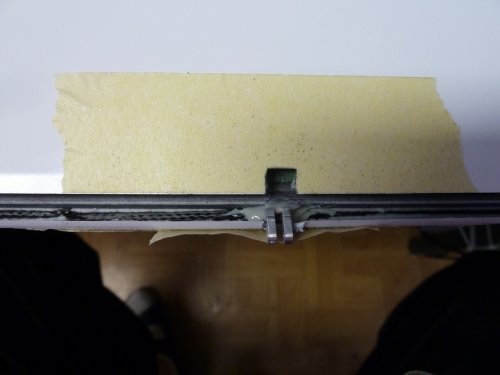
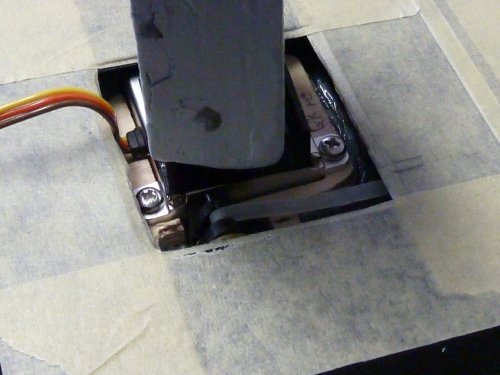
Der Servorahmen des QR muss so weit wie möglich an den Holm, da es ansonsten an der dünnen Stelle zu Problemen mit der Einbauhöhe kommt. Hier rächt sich das dünne Tragflächenprofil. Daher hab ich den Servorahmen an der oberen Stelle etwas abgeschliffen und auch eine Fase angebracht, damit die Klebenaht des Holm hier anliegt.
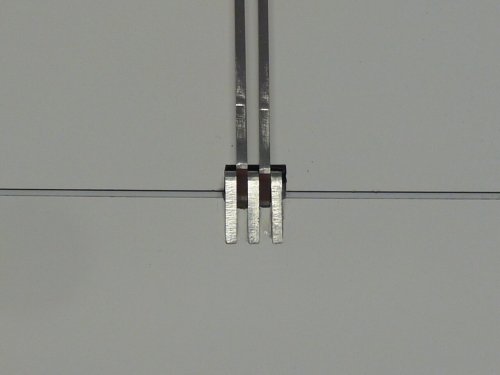
Die IDS-Anlenkung der Wölbklappe wurde in doppelter Ausführung geordert, was noch robuster ist und hoffentlich so manchen Lande-Fauxpas (mit gesetztem Butterfly) verzeihen wird. Der Einbau war etwas kniffelig, weil die Mimik nach und nach eingeführt werden kann beim verkleben. Hier ist es wichtig den Prozess vorher "trocken" durchzuspielen.
Das Ergebnis ist aber eine sehr stabile, habhafte Ruderanlenkung mit keinem wahrnehmbaren Spiel.
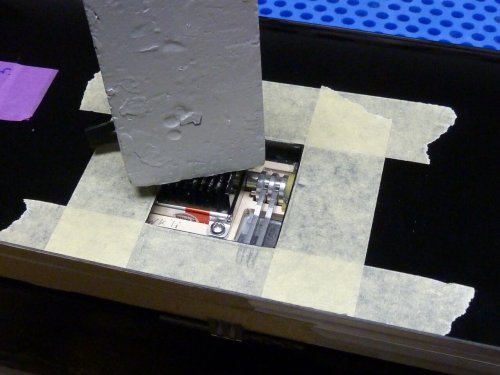
Nach dem Einbau der Servos musste die Servokabel noch eingezogen werden. Diese wurden vorab konfektioniert incl. des Kabel für das ACL, das auf dem Servodeckel des Querruder Platz findet. Den kompletten Kabelbaum habe ich vorab mit PET Gewebeband umwickelt, wie es auch im Automobilbereich zum Einsatz kommt.
Im letzten Schritt wurden nch die Stecker in den Flächen, passend zu ihren Gegenstücken am Rumpf verklebt und das ACL auf den Servodeckeln angebracht. Die Servodeckel werden erst nach erfolgreichem Erstflug aufgeklebt und vorab mit Tesafilm fixiert.
Zum Abschluss wurde das Modell zusammengebaut und alle Ruder auf Funktion getestet und grob eingestellt. Nun stehen dem dem Erstflug noch finale Einstellarbeiten und weitere Kleinigkeiten im Weg, wie beispielsweise das Anbringen der Steinschlagschutzfolie auf dem Rumpfboden. Der Erstflug ist also nicht mehr weit.